Indoor Laser Scanning Dataset
Indoor laser scanning dataset provides fours indoor point clouds data based on SLAM-mapping process. The scenes include large scale indoor parking lots, corridor and multiple rooms.
This dataset also includes line framework extraction results of the scenes and provides a brief description of the indoor scene.
Data Description
| Name | Number of Points | Scene | Visualization | Line framework | ||
| Scene 1 | 7.90 million | Indoor parking area | 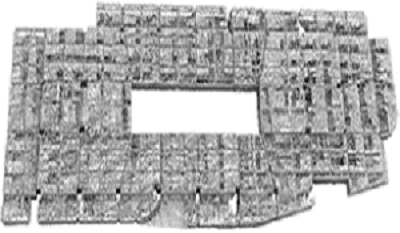 | 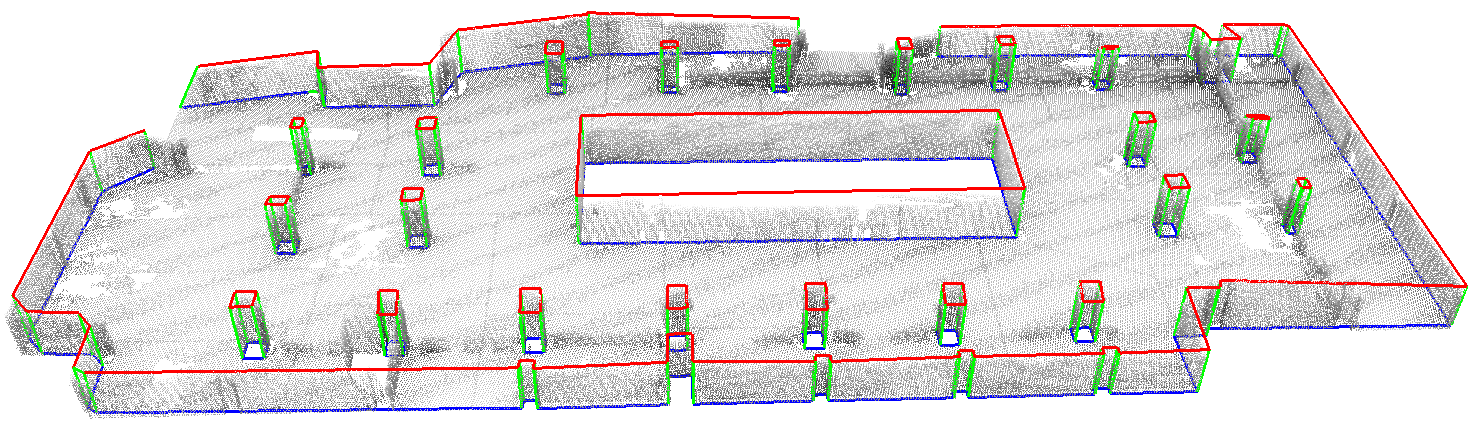 | ||
| Scene 2 | 3.85 million | Indoor parking area | 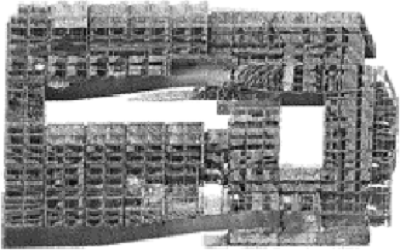 | 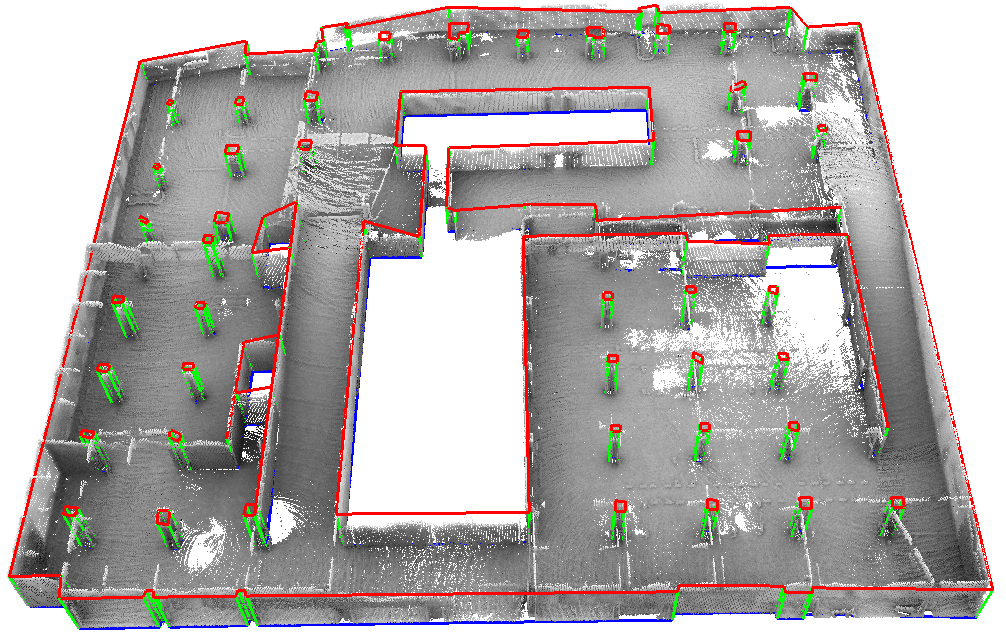 | ||
| Scene 3 | 2.10 million | Corridor | 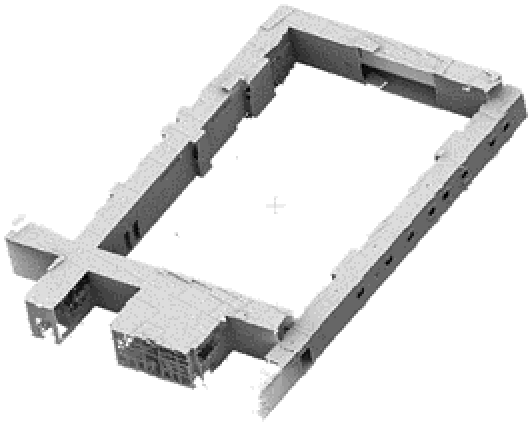 | 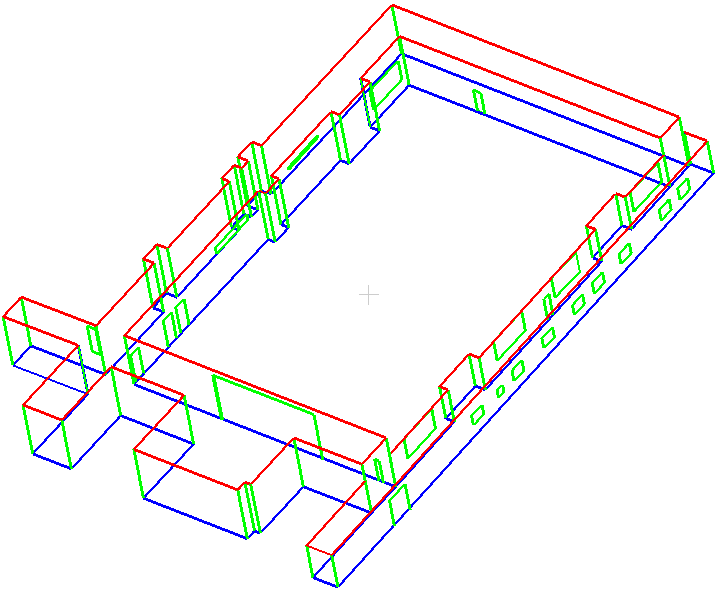 | ||
| Scene 4 | 8.62 million | Multiple rooms |  | 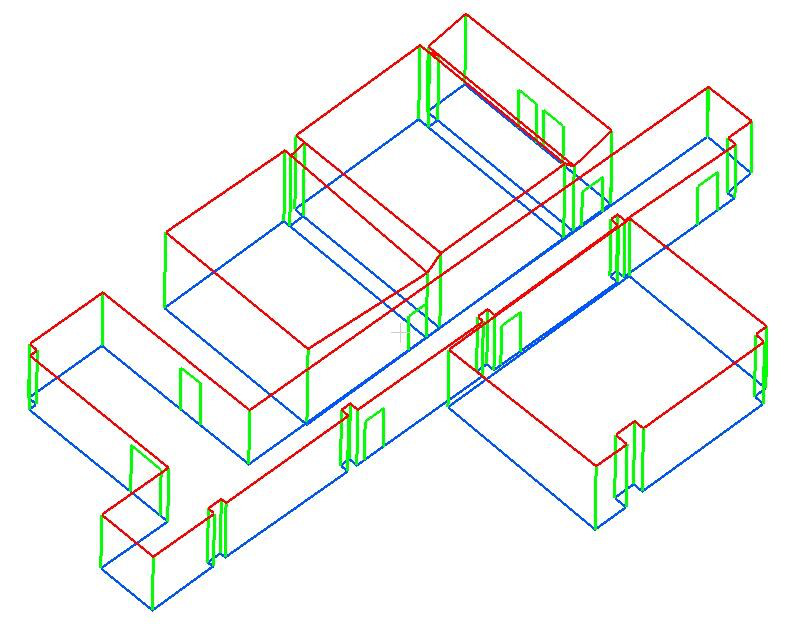 |
Download
Download per country
Copyright
The Indoor laser scanning dataset is published under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License (https://creativecommons.org/licenses/by-nc-sa/3.0/). You must attribute the work in the manner specified by the authors, you may not use this work for commercial purposes and if you alter, transform, or build upon this work, you may distribute the resulting work only under the same license. Contact us if you are interested in commercial usage.
Citation
If you use this dataset please cite the following paper:
-
C. Wang, S. Hou, C. Wen, Z. Gong, Q. Li, X. Sun, J. Li, Semantic Line Framework-based Indoor Building Modeling using Backpacked Laser Scanning Point Cloud, ISPRS Journal of Photogrammetry and Remote Sensing, Vol. 143, pp. 150-166, 2018.